
Loose Props – My affair with iFlight RevoBee32 F4 Pro Flight Controller
Had an iFlight RevoBee32 F4 Pro Flight Controller AIO mounted in a custom built 4” KATAK Stretch SE racing frame and flying it often in the unforgiving concrete environment of multi-storey carparks. Three months, five broken quad arms and two motors  later, the Revo Bee 32 F4 Pro is still working as it did on day one. I was initially concerned with the “infamous” noise issues of the ICM 20608 gyro on these flight controllers, but was instead very pleasantly surprised. The responsive smoothness and ‘locked-in-ness’ of flight is hard to describe and I am not alone experiencing this, it was echoed by a few other fellow flyers. Some may say it is placebo but I am pretty sure with what I felt from flying the same frame but with different FCs.
later, the Revo Bee 32 F4 Pro is still working as it did on day one. I was initially concerned with the “infamous” noise issues of the ICM 20608 gyro on these flight controllers, but was instead very pleasantly surprised. The responsive smoothness and ‘locked-in-ness’ of flight is hard to describe and I am not alone experiencing this, it was echoed by a few other fellow flyers. Some may say it is placebo but I am pretty sure with what I felt from flying the same frame but with different FCs.
Not an expert on noise or vibration filtering, but may I venture that the amazing flight handling is probably the way the ICM20608 gyro is employed on the iFlight RevoBee32 F4 Pro; enclosed in an acrylic damping box and with the gyro chip mounted with some clear silicon like material within the damping box instead of just on sticking on exposed foam. The rubber bobbins soft mount and low ESR 1000uf capacitor on the power cable, which I have on all my builds, together with the stiff sturdy TRP KATAK Stretch frame probably helps.
With my doubts of ICM20608 gyros eased, I decided to build up the 5” TRP KATAK Stretch racing frame that has been sitting on my work bench. This time round, except for the FPV components, I decided to use iFlight power train components.
Build list of the 5” TRP Katak Stretch
- Betaflight 3.2.5 OMNIBUSF4SD firmware
- IFlight Revo Bee32 F4 Pro Flight Controller
- IFlight iOn Drive 2207, 2500kv motors
- iPeaka Mini 35amp BLheli 32 ESC
- RunCam Eagle 2
- EWRF 708TM3 adjustable power VTx
- Frsky XSR (hacked)
- TRP KATAK Stretch 5” frame
- Props Dal Cyclone 5050
 This 5” frame exhibits the same tight flight performance as with the 4” but considerably faster, tighter in turns and minimal propwash, probably due to the props used and the power of the iON Drive motors. It flies well on Betaflight 3.2 defaults, but I eventually ended with higher P and I gains for an even tighter flight with D gain around 10 below defaults which is my usual settings. However, quite strangely unlike the 4” TRP, this 5” TRP suffers from wobbles and oscillation on Betaflight 3.3RC3 default PIDs, the P gain has to around 12 points BELOW default compared to my usual of about 10 ABOVE defaults, the D gain was also lower than usual. This “too high” PIDs oscillations on Betaflight 3.3 defaults seem to affect all my of 5” builds with different FCs which is weird. All said, I am really happy with the results; “smoothness and lock-in-ness” coupled with explosive speed and response from the iPeaka BLheli 32 ESCs – iON Drive motors, this TRP KATAK Stretch is now my favourite quad. Honestly for a flyer of not so great skill such as myself it can be a handful but like they say, power is addictive and corrupts logic!
This 5” frame exhibits the same tight flight performance as with the 4” but considerably faster, tighter in turns and minimal propwash, probably due to the props used and the power of the iON Drive motors. It flies well on Betaflight 3.2 defaults, but I eventually ended with higher P and I gains for an even tighter flight with D gain around 10 below defaults which is my usual settings. However, quite strangely unlike the 4” TRP, this 5” TRP suffers from wobbles and oscillation on Betaflight 3.3RC3 default PIDs, the P gain has to around 12 points BELOW default compared to my usual of about 10 ABOVE defaults, the D gain was also lower than usual. This “too high” PIDs oscillations on Betaflight 3.3 defaults seem to affect all my of 5” builds with different FCs which is weird. All said, I am really happy with the results; “smoothness and lock-in-ness” coupled with explosive speed and response from the iPeaka BLheli 32 ESCs – iON Drive motors, this TRP KATAK Stretch is now my favourite quad. Honestly for a flyer of not so great skill such as myself it can be a handful but like they say, power is addictive and corrupts logic!
Current filter settings on both quads
Note : these are my settings, not “blackboxed” and may or likely not work for everyone. Be aware of the risk of smoking motors and ESCs when meddling with filters
- Loop time = 8k/8k Dshot 600
- Dynamic Filter = default OFF (ON both quad)
- Gyro_lowpass_ type = default PT1 (both quads)
- Gyro_lowpass_ hz = default 90hz (4” 80hz, 5” 100hz)
- Dterm_ lowpass_type = default Biquad (PT1 on both quad)
- Dterm_lowpass = default 100hz (4” 90hz, 5” 110hz)
- Gyro Notch Filter 1 = default ON (OFF both quad)
- Gyro Notch Filter 2 = default ON (OFF both quad)
- Dterm Notch Filter = default ON (4” ON, 5” OFF)
- Gryo_ stage 2_ lowpass = default 0Hz (4” 200hz, 5” 0hz)
I had “heavier filtering” on the 4” quad that is running Betaflight 3.3. RC 3 as the bearings on the motors are pretty beat up and was just “meddling” with the stage 2 lowpass which likely is not needed, do note that additional filters will introduce delay.
My Thoughts on REVOBEE32 F4 PRO
To be totally honest, while the flight performance of the iFlight RevoBee32 F4 Pro Flight Controller is amazing and one of the best I came across, it is isn’t all straight forward install, did experience some issues which I listed below.
- Build quality – really good, all the chips and components are neatly aligned and soldering look pretty well done, and the ESCs pads are not just on the top and below but the side edge as well. Overall if looks alone can kill, this board will.
- ESC Connection – really like the corner connection (power, signal and ESC telemetry pads) really great for cleaner and easier ESCs connections. Believe the Revo Bee32 F4 Pro is designed for individual ESCs but it does have a JST with motors PWM out for signal connection to 4in1 ESCs, along with Current, VBat and RX1, probably for ESCs telemetry connections. However not that with the “corners”, this FC may not fit into frames with small cage.
- UARTs – There are 3 UARTs, this is where I encountered something strange
- besides SBUS which is on UART R6, I had Smart Port and Smart Audio connected
- Smart Port (uninverted) will only worked on UART 1
- Smart Audio will not work on UART 1 or 3,
- Smart Audio only work on soft-serial, remap motor 5 pin (really tiny pad)
- same situation with various versions of Betaflight
- Connections – all header pinholes, which I don’t quite fancy, instead I solder them like pads without inserting the wires through the holes. The connections points for buzzer, LEDs, Txs and Rxs are logically arranged for straight forward connections.
- Voltage Outputs – BEC with 5V, 1 amp (buck) and LC filter for FPV components supply at 800mA.
- Choice of VBat or 5 volts for FPV components and 5 or 3.3 volts for UARTs. For best video feed, FPV Cam and VTx connections should be grounded at the AGND point
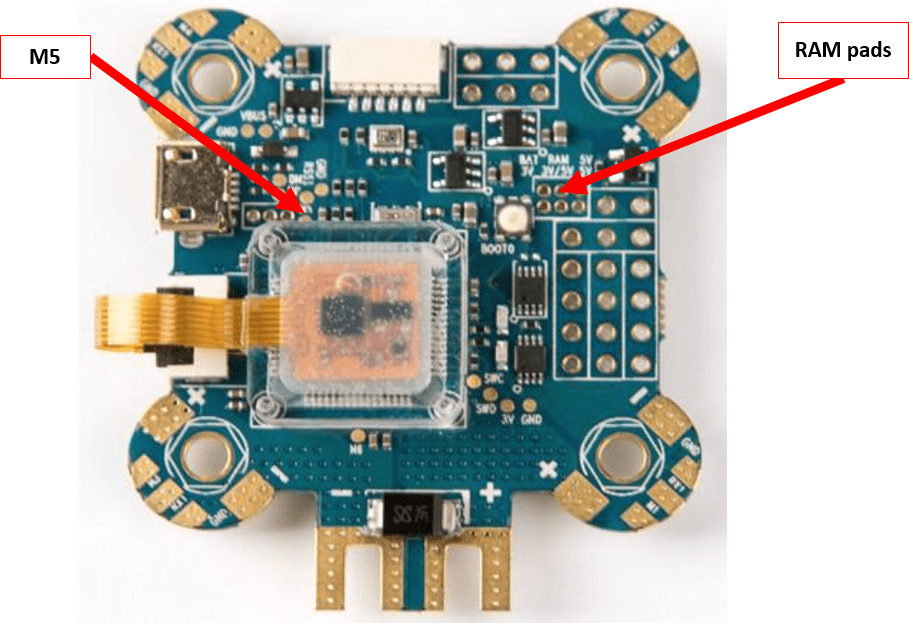
- Voltage selection through solder bridging of pads (RAM), again tiny header pinholes here not pads.
- I felt that the two rows of 3 bridging pads or rather pinholes for voltage selection are too close together and may pose a risk of “mis-bridging” for those of lesser soldering abilities or the less careful of us.
- Current and VBat sensor – using an inline power meter to compare, the voltage is pretty spot on but the current scale had to reduced in Betaflight from default of 400 to around 230 for a closer current reading.
- The Gyro – while the gyro itself is “vibration isolated”, I would still suggest that the RevoBee32 Pro flight controller as a whole be soft mounted to avoid potential vibration issues which can be a pain to chase down.
- Maybe unfounded and had not happened to me, but given the length and exposed location of the gyro ribbon
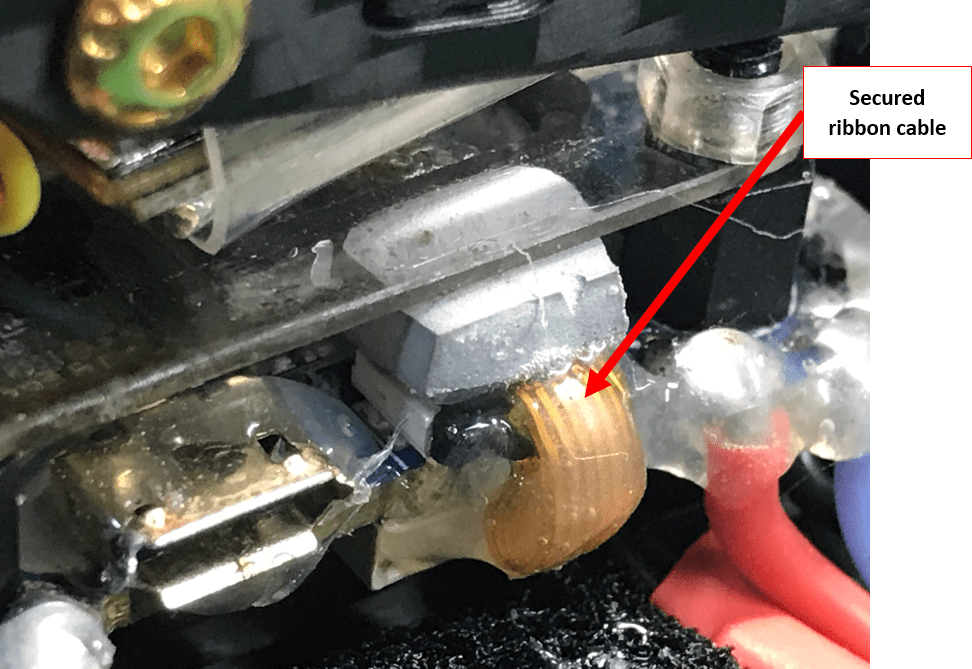 cable, I felt there it is a risk that ribbon cable may get caught by a small branch or the likes in a crash. To be safe, I folded the ribbon downwards and hot glued the lot down including the connector lock, taking much care to NOT KINK the ribbon. Folding upwards may actually loosen the connector’s lock causing gyro connection failure. A fellow pilot had to replace the gyro on his board after high speed crash that kinked the ribbon. As I understand it, iFlight carries both ICM20608 and MPU6000 replacement gyros kit, they are cheap and very easy to install
cable, I felt there it is a risk that ribbon cable may get caught by a small branch or the likes in a crash. To be safe, I folded the ribbon downwards and hot glued the lot down including the connector lock, taking much care to NOT KINK the ribbon. Folding upwards may actually loosen the connector’s lock causing gyro connection failure. A fellow pilot had to replace the gyro on his board after high speed crash that kinked the ribbon. As I understand it, iFlight carries both ICM20608 and MPU6000 replacement gyros kit, they are cheap and very easy to install - Unlike the 4” build with this board, my second 5” build had random arming problem, taking a long time or failing gyro calibration, which was resolved by changing the moron_threshold from default 48 to 70 in CLI. I am not sure but seem I am the only one I know is experiencing this, the issue appears to be more persistent with test /RC Betaflight 3.3 FW.
- While I am yet to be convinced of the stability or benefits of running 32k gyro/pid loop with current FW, I just had to try. On both builds, 32k or 16k gyro loop, in any permutation is not possible without overclocking which creates issues of temperature, inconsistent arming and vibrations. Running at 8k/8k proves to be really stable and less prone to glitches, etc, from my own experience
- Maybe unfounded and had not happened to me, but given the length and exposed location of the gyro ribbon
Summary
Despite the few grumblings, in summary, from a performance, quality and price perspective, I like this board. Except for one guy who had a board failed upon first lipo power up, which iFlight’s distributor Total Rotor replaced, I do not know of any other quality issues. Given the flight experience – “smoothness and “locked-in-ness” – I will not hesitate to use it again for future builds or recommend it. The flight performance of my 5” TRP KATAK Stretch build was enough to have another pilot consider an identical setup!

Hello, I also bought this flight controller for myself, but I have a problem. I can no longer connect it to my computer, Betaflight can no longer find it and I have the green light on.