This article first appeared on OscarLiang. Click here for the original article.
As part of setting up a quadcopter or racing drone, it’s very important to make sure your transmitter sticks match the radio signal received in the flight controller.
You quad would fly more accurately and reliably with the correct channel end points and mid points.
In this tutorial I will show you various ways of correcting your radio channels’ mid points and end points. In theory only the Roll, Pitch, Yaw and Throttle channels need adjusting, most of the times you can just leave other AUX channels unless they are way off.
Here is a list of other tutorials we have for the Taranis TX.
Problems with wrong mid point
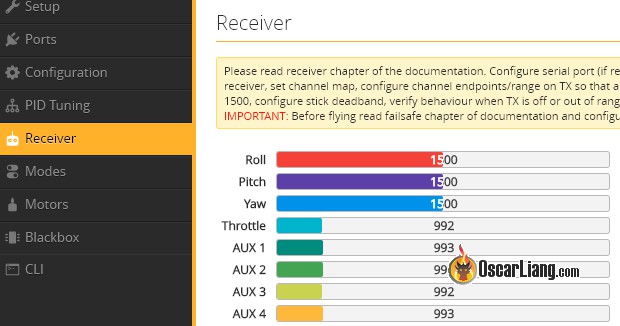
The mid points of Roll, Pitch and Yaw channels should be at 1500 when the sticks are idle.
A quadcopter with centred sticks should just stay at the exact angle and move toward the direction you want it to go. But when your mid points are off, the quad would tend to drift and requires constant manual correction.

Problems with mid points on Roll, Pitch and Yaw channels
How to adjust channel mid point
You can do it by one of the following methods:
- Trim your transmitter sticks
- Do it in the Outputs/Servos screen in Taranis
Trimming your sticks using the buttons right next to your sticks is probably the easiest way, that’s totally fine to do. But I found that to be a little less precise than what I am going to show you.
Check out this post to learn about what makes a good radio transmitter
Go to the “OUTPUTS” page on your Taranis (or “SERVOS” if you are using an older version of OpenTX). And you could adjust the “1500” numbers at the end of each channel to change the mid points.


Correct channel mid points at 1500
Don’t worry about throttle mid point, it’s irrelevant.
On some equipment there could be RX jitter, i.e. the numbers jump slightly around 1500, e.g. 1498-1502. It’s totally normal but if that happens you still want to get it as close to 1500 as possible, and you could set a “deadband” for that particular channel in Betaflight.
Problems with wrong end points
You want to use the full stick range, always. That means your lowest channel value should be lower than 1000, and the highest value should be over 2000. Otherwise your quad might not fly exactly the way you intend to.
For yaw, roll and pitch channels, this means the quad would tend to turn to one side faster than the other, making it harder to control. For throttle, not using the full throttle range means you are not using the maximum power of your quad.
You might even have problem arming your quad if the end points and mid points are way off, which is a built-in safety feature in many flight controller firmware.
Testing your channel end points
Connect your FC to Betaflight configurator, go to the receiver tab, and power on your receiver.
Move your transmitter sticks to the extreme values: i.e. bottom left and top right, and make note of the values you see in the Roll, Pitch, Yaw, and Throttle channels in Betaflight.
![]()

Problems with channels’ lowest end points
Now move your sticks to the top right for the highest values and write them down.
![]()

Problems with channels’ highest end points
Ideally, you should see 1000 as the low end values for all channels (or slightly lower is acceptable), while the high end values should be 2000 (or slightly higher). If not then you can move on and fix them.
Ways of adjusting end points
You can adjust your end points using one of the following methods:
- Do it on your Taranis TX’s Outputs/Servos Page (Sub-Trim)
- Using RXRange command in Betaflight CLI
Outputs/Servos Sub-Trim
In the Taranis, navigate to the OUTPUTS screen (or SERVOS if you are using an older version of OpenTX).
Adjust the MIN parameter until the channel value reads 1000. Do this for all four channels: pitch, roll, yaw, and throttle.


Correct channels’ lowest end points
Next, hold the transmitter stick up/right and adjust the MAX parameter to set the channel value to 2000.


Correct channels’ highest end points
By default, the Taranis won’t allow you to set endpoints greater than 100. If you can’t get your endpoints to 1000 and 2000 without going over 100%, you can enable “EXTENDED LIMITS” in the MODEL SETUP screen. But this is usually the last resort and avoid doing it if possible.

Using RXRange to adjust end points
For those who cannot adjust their endpoints in the radio, or don’t want to do it on the radio, you can also do it in Betaflight using the “RXRange” command.
Enter “dump” in CLI, and look for “rxrange“, you should find 4 lines, and they represent the first 4 channels in the radio, e.g. Roll, Pitch, Yaw and Throttle. (You should verify if that’s the correct order in your setup)
rxrange 0 1000 2000 rxrange 1 1000 2000 rxrange 2 1000 2000 rxrange 3 1000 2000
Move your TX sticks to the lowest position, write down the numbers in the “Receiver Tab” in Betaflight. Do the same by moving the sticks to the highest position.
![]()
![]()
For example, we can see the range of Roll is 1004 – 1995. By entering this in the “rxrange” command will make the resulted range 1000-2000, i.e.
rxrange 0 1004 1995 save
You can now do the same to the other 3 channels according to the existing end points we recorded:
rxrange 1 1004 1997 rxrange 2 1004 1996 rxrange 3 1002 1999 save
Now all 4 channels should give you 1000 to 2000 end points respectively. If there is still a tiny bit of difference, you can fine tune it using the first method we covered here (Outputs Sub trim).
Still having problems?
If your taranis has consistently wrong end points and mid point, you should definitely try to calibrate the sticks first and repeat the steps in this tutorial. And ask for more advice in our forum.
This article first appeared on OscarLiang. Click here for the original article.
